
Az Uber kutatói nemrég mutatták be a MultiNet rendszer újdonságait, amely mesterséges intelligencia segítségével a cég sofőr nélküli autóiban képes érzékeli és megjósolni a jármű számára akadályt jelentő objektumok mozgását. Tehát ez a rendszer annyival tud többet az eddigieknél, hogy nem csak a már megtörtént és épp történő eseményeket képes felfogni, hanem már arra is "gondol", mi történhet később.
A meglévő modellekkel szemben a MultiNet az autók, gyalogosok és biciklisek mozgásának bizonytalan viselkedési mintáit is figyelembe veszi, és az észleléseket jóslatokkal kombinálva alkotja meg a lehetséges mozgási vonalakat, tehát egy adott objektum jelenlegi helyzetén kívül egy csomó egyéb helyzetet is előre vetít.
Bár ez elég nehéz feladat, szükségszerű valami hasonló fejlesztés a balesetek elkerülése érdekében. A rendszernek eleve előre kell látnia a történéseket és nem is csak egy szálon jósolhat a többi közlekedőről, hanem egy egész lehetséges tartományt kell kiszámolnia. Végeredményben az önvezető autónak minden lehetséges történésre készen kell állnia, és annak megfelelően korrigálnia.
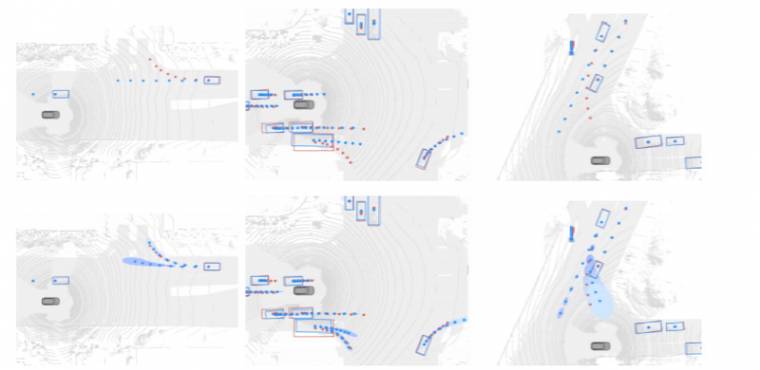
A MultiNet LiDAR-szenzorokkal és nagyfelbontású térképekkel dolgozik, folyamatosan tanulja az útvonalakat, valamint mozgási bizonytalanságokat. A kutatók szerint a MultiNet járművek, gyalogosok és biciklisek terén is jól vizsgázott a jóslatok pontosságát illetően, a bizonytalanságot 9-13 százalékkal tudják már modellezni - természetesen ez még nem tökéletes, de az irány jó. Gondoljunk csak bele egy hirtelen elhasaló kerékpáros, vagy egy út közepén megijedő, hirtelen visszaforduló gyalogos esetébe - a jelenlegi megoldások ezeket a "humán faktorokat" nem veszik figyelembe, pedig még az emberi sofőröket is sokszor megzavarják a hasonló esetek.
