
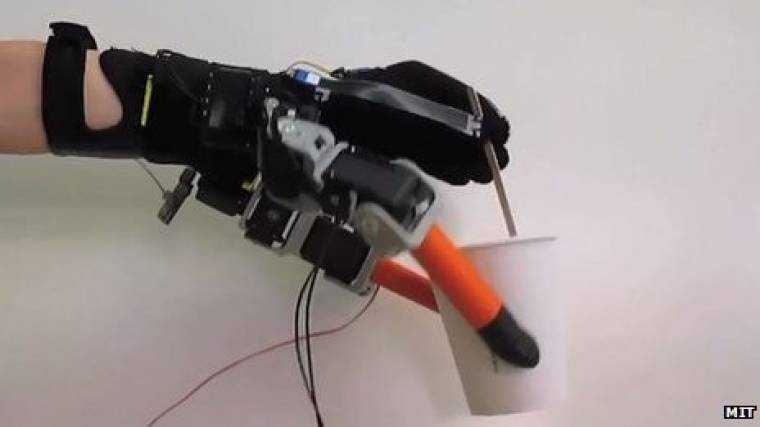
Gondolt már rá, hogy az öt ujjunk nem biztos, hogy elég? Az MIT-nél már felmerült ez a kérdés. A kutatóintézet gépészmérnöki részlege kifejlesztett egy robotkesztyűt, mely plusz két ujjat ad a meglévő öthöz. A két hosszabb ujj a kéz két oldalán helyezkedik el, és rendkívül egyszerű őket használni.
„Pusztán a kezünk természetes mozgatásával irányítható a robot” – mondta el Harry Asada mérnökprofesszor. „A kéz mozgására reagálnak az robotujjak, és segítenek a többinek.” A kesztyű működése a biomechanikai szinergián alapul, azon az ötleten, hogy minden ujjunk kölcsönösen reagál egymás mozgására. Ha meg akarunk fogni egy üveget, a robotujjak megpróbálnak segíteni.
A csoport úgy alakította ki szinergiai algoritmusát, hogy egy prototípust több helymeghatározó szenzorral szereltek fel, és manuálisan mozgatták az ujjakat, miközben különféle tárgyakat fogattak meg vele. Ezek az adatok meghatároznak egy sor speciális mozgásmintát, mellyek segítségével a robot következtetni tud viselője szándékára. Egyelőre a kesztyű kénytelen erre az algoritmusra támaszkodni, de a csapat reméli, hogy a jövőben fejleszteni tudják majd a gépet, hogy aktívan, viselője speciális mozgásához alkalmazkodva tanuljon.

A kesztyű prototípusa elég nagyméretű, de a fejlesztők biztosak abban, hogy kisebbé, összecsukhatóvá tudják majd alakítani. „Bele tudnánk építeni az ujjakat egy órába, vagy karkötőbe. Ha szükség van rájuk, kinyílnak az órából, és dolguk végeztével visszatérnek oda” – magyarázta Asada. „A viselhető robotok az egyik módja annak, hogy közelebb hozzuk a robotikát a mindennapi életünkhöz.”
