A robotika reneszánszának hajnalán legalább annyi gépi négylábút fejlesztettek már világszerte, mint kétlábú humanoidot. Van tűzoltó és tűzokádó kutya, használják őket őrző-védő, idegenvezető feladatokra, vagy akár csak egyszerű házi kedvencnek, gépi játszótársnak. Egy új digitális négylábú azonban egészen hétköznapi dologban fogja segíteni az embert.
A cigarettacsikkek komoly veszélyt jelentenek az ökoszisztémánkra, különösen akkor, ha valamilyen élő vizünkben kötnek ki végül. Mivel azonban az apró szemetet viszonylag macerás összeszedni, főleg vízpartok közelében, így sokszor szennyezik műanyaggal tengereink, óceánjaink élővilágát. Olasz tudósok egy csoportja most erre gondolva alkotta meg VERO nevű robotját.
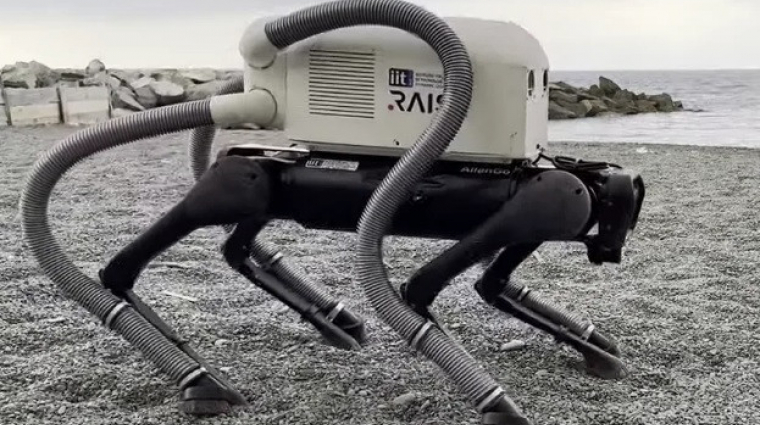
A fejlett képességekkel rendelkező szerkezet képes felismerni a szemetet, és a végtagjait egyfajta porszívóként használva felszedni azokat. A VERO-t arra tervezték, hogy különböző nehezített terepeken is jól tudjon teljesíteni ebben a tevékenységében.
A szerkezetet a genovai Olasz Technológiai Intézet Dynamic Legged Systems laboratóriumának kutatócsoportja tervezte és építette. A csoport már áprilisban publikált egy tanulmányt a szaksajtóban az akkor még csak készülőben lévő darabról. Az írás szerint az innováció elsősorban a mikroműanyag problémakörének enyhítését célozta meg.
Állításuk szerint a csikk a második leggyakoribb hulladéktípus, ami a környezetbe kerülve egy igen nehezen orvosolható problémát okoz világszerte. A bomlásuk során mérgező vegyi anyagokra és 5 mm-nél kisebb műanyagrészecskékre eső szemét az egyik legnehezebben összegyűjthető fajta, hiszen a kerekeken guruló illetve lánctalpas szemétszedő megoldások sem boldogulnak velük legtöbbször.
Ezzel szemben a VEOE kezelője beállít egy célpontot, melyen a gépnek át kell haladnia. A program indítása után a robotkutya végigsétál a kijelölt területen, miközben egy speciális neurális hálózat és kamerák segítségével azonosítja a szemetet. Az eb úgynevezett konvulziós hálózatnak köszönhetően ismeri fel azt, hogy szeméttel van dolga, majd a porszívóként funkcionáló lábaival fel is szedi.
A robot az állára szerelt Intel RealSense kamerákkal sikeresen tudja stabilizálni magát. Az új négylábú munkagép az első tesztek során nem tudott minden útjába kerülő szemetet felszedni, de így is jól teljesített. A kijelölt partszakaszon sikeresen azonosította és szippantotta fel az útjába kerülő cigarettacsikkek és egyéb apró szemetek 90 százalékát, ami biztató eredmény.
