
Nagy tempóban fejlődnek a robotautók és a sofőr nélküli technológiák, bár nehézségek és kihívások mindenhol akadnak. Nem csak a kenguruk törnek azonban borsot a cégek orra alá.
Nemrég előkerült egy kép (lent látható), amely önmagában feladja a leckét bármilyen sofőr nélküli rendszernek. És egyben azt is megmagyarázza, hogy miért van dugig szenzorokkal egy robotautó (a kamerák mellett ultrahangos érzékelő, radar és lidar is van rajtuk).
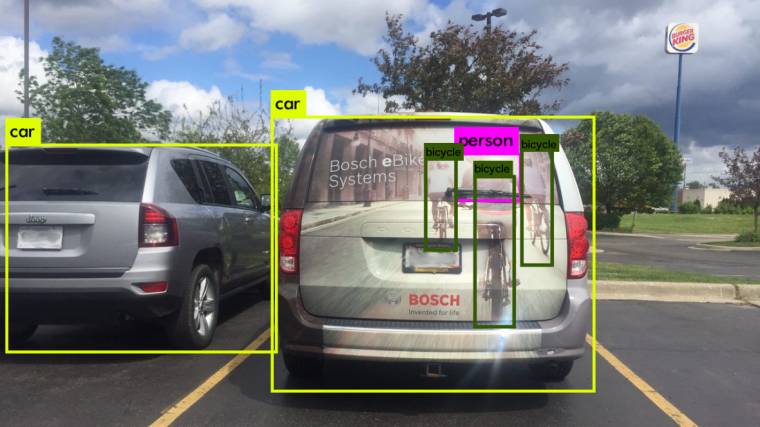
A lenti kép egy olyan határesetet mutat be, amelyben a jármű megjósolhatatlanul viselkedik, mert a szoftvere másképp dolgozta fel a környezeti feltételeket, mint egy ember tenné.
Ebben a példában a képfelismerő rendszer a normál kamera képét vette alapul, és azt hiszi, hogy a furgon hátuljára ragasztott kép helyett valódi biciklisekkel van dolga.
Ezt a rést a Cognata azonosította, amely szoftveres szimulációk segítségével igyekszik felderíteni a hasonló gyengeségeket, és megoldást találni kockázatok nélkül.
A legtöbb autógyártó ezt a gyengeséget eltérő szenzorok bevetésével küszöböli ki. A lidar nem boldogul az üveggel, a radar leginkább csak a fémet érzékeli, a kamerát pedig átverik a képek. Ahogyan az autók szoftverei fokozatosan megtanulják kezelni az ilyen határeseteket, idővel az összetett szituációkban is használhatóvá válnak.
Éppen ezért kritizálták korábban egyébként a Teslát, amely a robotpilótájához csak radart, kamerát és ultrahangos szenzort használ - az eddigi legnagyobb baleset során egy nyerges vonatóba csapódott (a sofőr meghalt) egy Tesla, mert nem tudta megkülönböztetni azt a világos égtől. A kritikusok szerint a lidar használata elengedhetetlen, az ugyanis kevés fény és tükröződés mellett is kiváló, és több adatot szolgáltat, mint a radar vagy az ultrahang. Persze a lidarnak is vannak hibái: a piros és a zöld jelzések között nem tesz különbséget.
